
bitPak:Drive--販売終了
送料区分: 650
販売終了
商品コード: SEDU-052870
発売日: 2018-12-11
短いURL: ssci.to/5287
2024年2月5日に販売終了しました。
micro:bitで2輪車を作ることができるパッケージキットです。在庫限りの商品です。
このキットを使用するためには、別途 micro:bit(マイクロビット)と単4電池3本が必要です。
micro:bit用コントローラーキットやmicro:bit用ジョイスティック付きコントローラーキットを使い、ラジコンカーのように遊ぶこともできます。
車体のパネルにはネジ止め用の穴が用意されています。お好みの部品を取り付けてオリジナルカーを作りましょう!
※本キットは、micro:bit用ベーシックモジュールキット(在庫限り品)とmicro:bit用電池モジュールキット(在庫限り品)を利用しています。モジュールを既にお持ちの方は、bitPak:Drive用パーツセット(在庫限り品)をご購入ください。
2019年6月3日 追記
2019年6月2日まで販売していましたbitPak:Drive(コントローラーなし)と同じ商品です。2019年6月3日より商品名を変更いたしました。
そのため、2019年6月3日以前にご購入されていても新商品名の商品をお届けする場合がございます。
また、2019年6月3日より、メタルスペーサー(長)を4本追加しました。micro:bitへのプログラム書き込みをBluetooth接続で行う人向けです。詳細は、組立動画(YouTube) 4分40秒~5分10秒をご確認ください。
仕様
- micro:bit使用ピン番号
- P1 :回転サーボモーター1(J2)
- P2 :回転サーボモーター2(J3)
- P3 :回転サーボモーター3(J4)
内容物
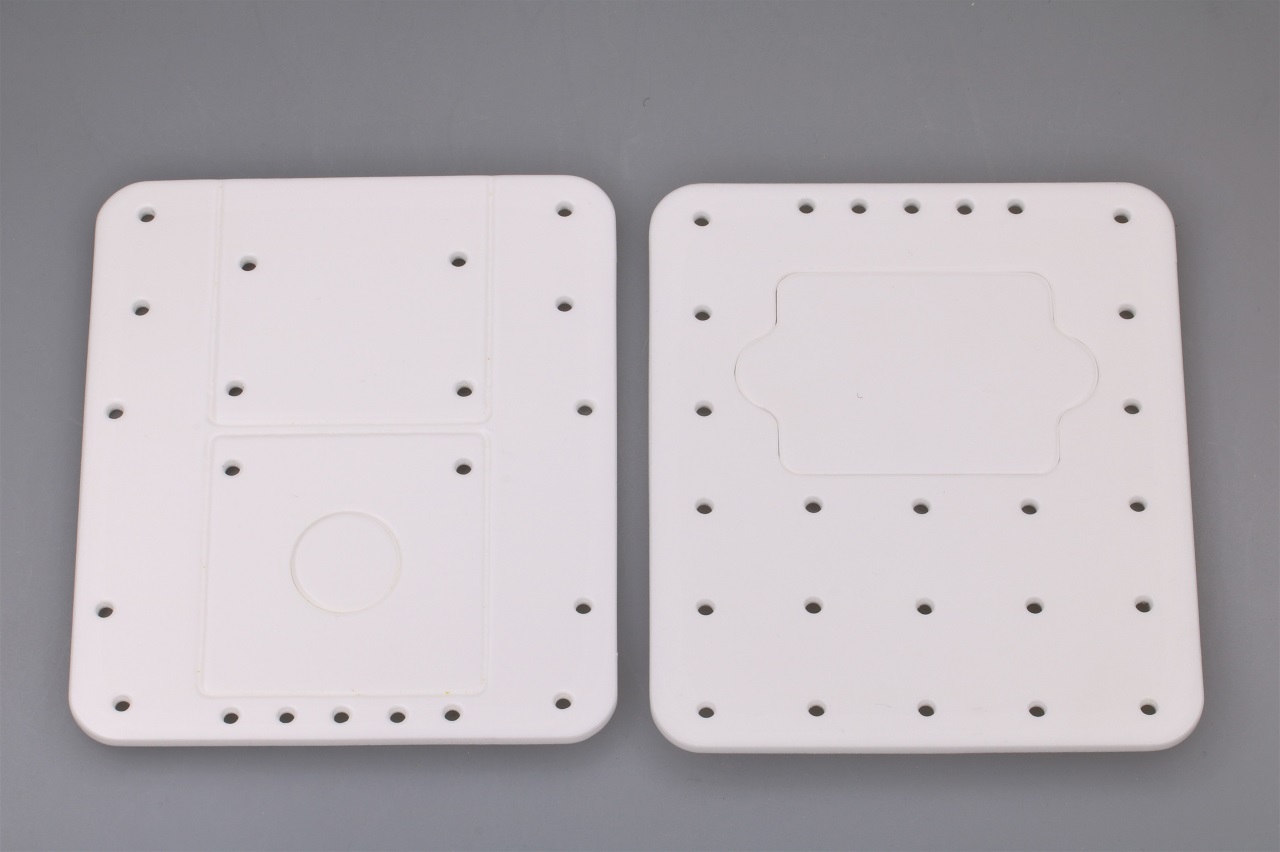
- 車体(2枚入り) x 1セット
- 電池モジュール本体 x 1台
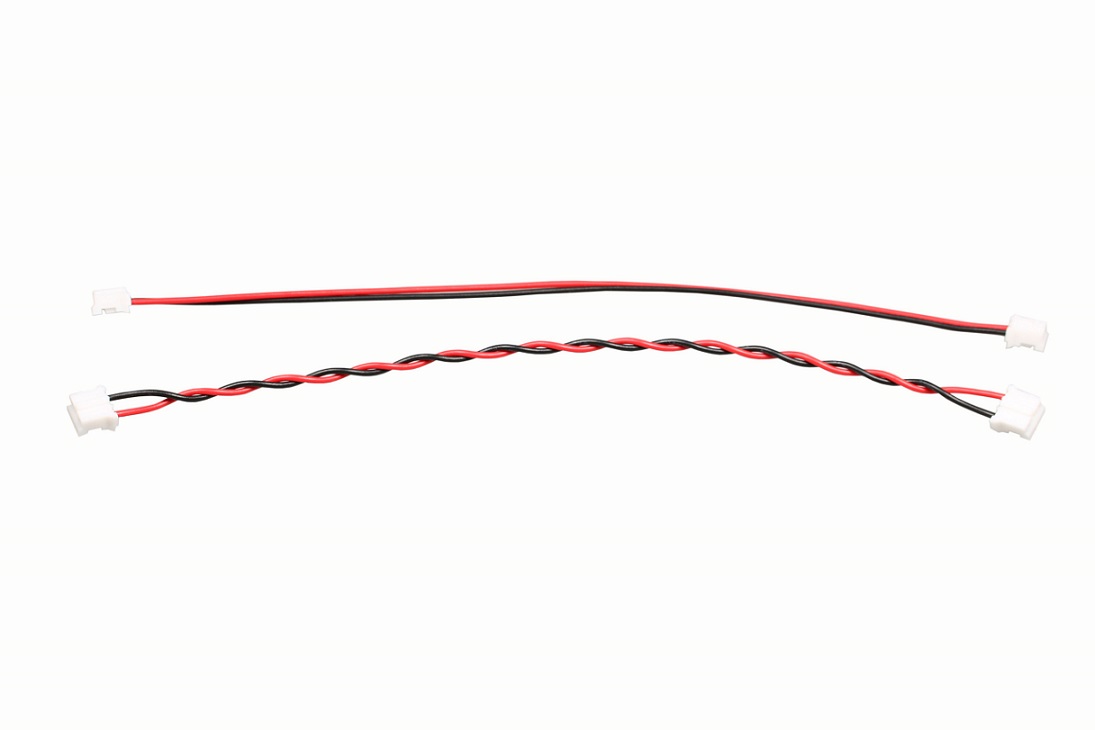
- micro:bit用ハーネスとモジュール用ハーネス x 1セット
- ベーシックモジュール(サーボモーターモジュール)本体 x 1台
- 回転サーボモーターFS90Rとサーボホーンセット x 2セット
- サーボホイール x 2 セット
- サーボモーターサポーター x 2個
- キャスター とキャスターサポーター x 1セット
- M3 x 8mm 小ネジ x 6本(赤色シールの袋に入っています)
- M3 x 5mm 皿ネジ x 6本(青色シールの袋に入っています)
- M3 x 6mm 小ネジ x 12本(黄色シールの袋に入っています)
- M3 ナット x 8個
- メタルスペーサー x 4本
- メタルスペーサー(長) x 4本(緑色シールの袋に入っています)※2019年6月3日から
- 樹脂スペーサー(白)大 x 4本、中 x 2本、小 x 2本
車体
電池モジュール本体

micro:bit用ハーネス(上)とモジュール用ハーネス(下)
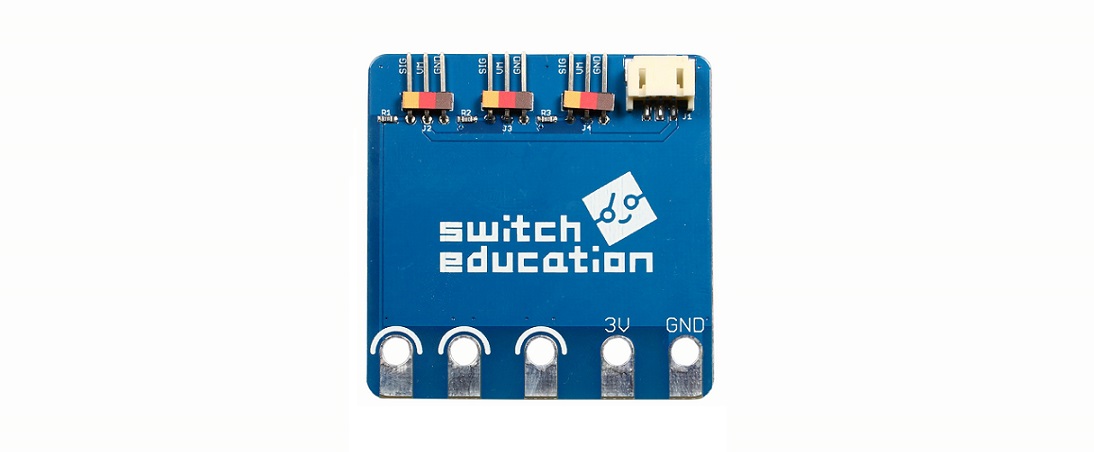
ベーシックモジュール(サーボモーターモジュール)本体
回転サーボモーターFS90Rとサーボホーンセット

サーボホイール

サーボモーターサポーター

キャスター とキャスターサポーター

M3 x 8mm 小ネジ

M3 x 5mm 皿ネジ

M3 x 6mm 小ネジ

M3 ナット

メタルスペーサー

メタルスペーサー(長)※2019年6月3日から

micro:bitへのプログラム書き込みをBluetooth接続で行う方は、上記スペーサーではなくこちらをお使いください。micro:bit裏にあるリセットボタンが押しやすくなります。
樹脂スペーサー(白)

資料
- 電池モジュール回路図(PDF)
- ベーシックモジュール回路図(PDF)
- 組立方法(YouTube)
- プログラミング方法1. 右回転、左回転、前進、後進、停止(YouTube)
- 動画で紹介したプログラム
- プログラミング方法2. 無線通信(YouTube)
- 動画で紹介したプログラム(リモコン側)
-
動画で紹介したプログラム(車側)
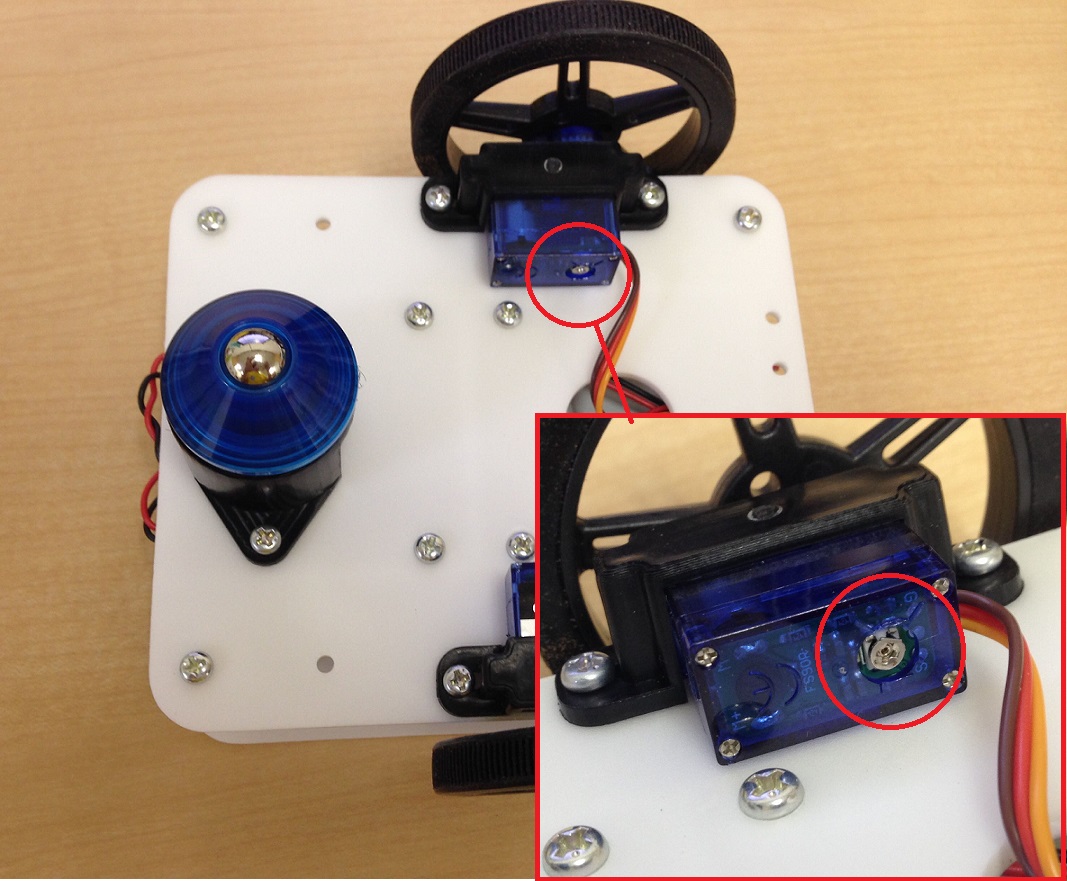
- 90度に指定しているのに、わずかに動いている場合
回転サーボモーターは角度を90度に指定すると停止するようになっていますが、特性上わずかに動いてしまう場合があります。この場合、「プログラム」で対応する方法と「回転サーボモーターの調整」で対応する方法、2つの解決方法があります。- プログラムで対応する方法
指定する角度を90前後(93、87など)に変更し、実際に動きを確かめてみてください。地道な作業ですが、角度の数字を微調整して停止する数字を探しましょう。 - 回転サーボモーターの調整で対応する方法
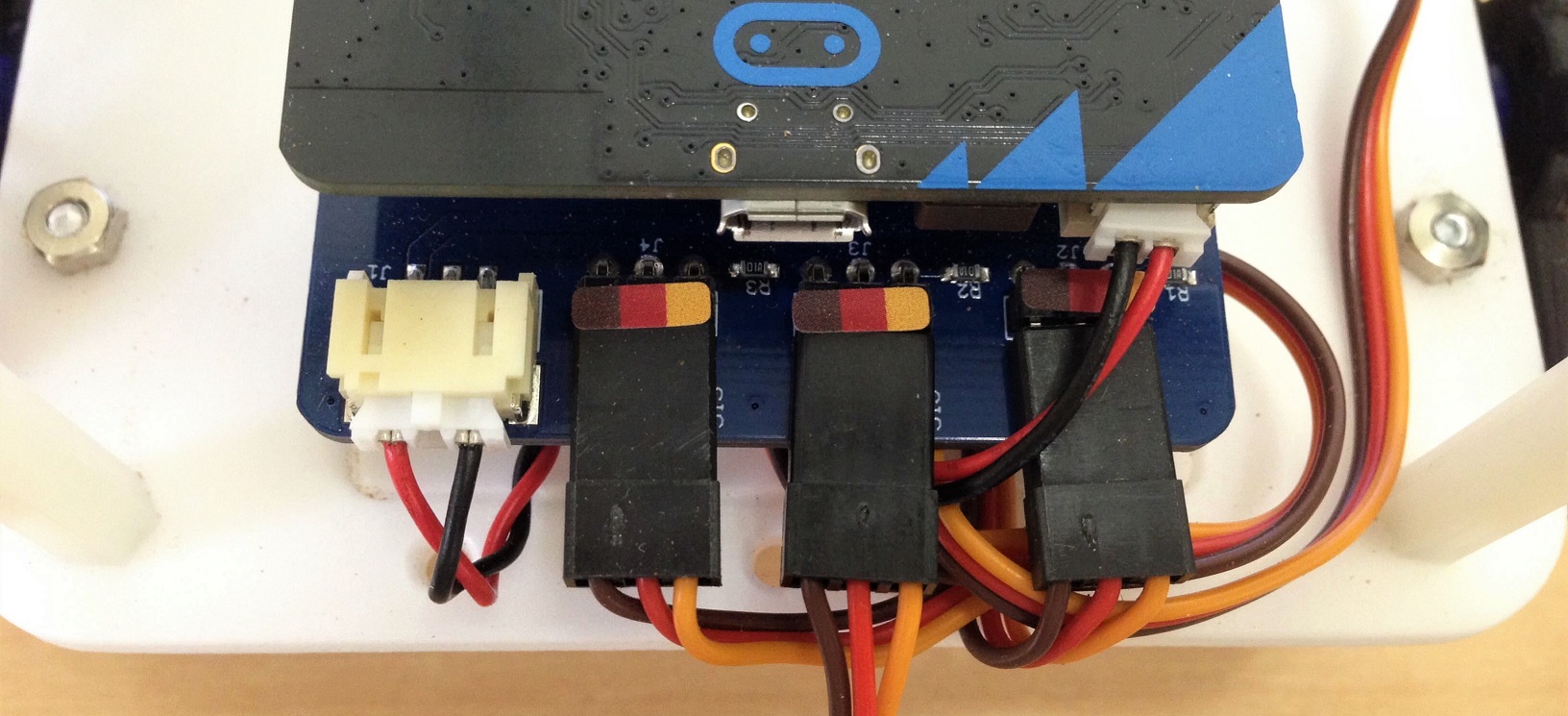
わずかに動いている状態でDriveを裏返しにして、ドライバーを使って写真赤丸部分にあるネジ(トリマポテンショメーター)を少しだけ回します。時計回り、反時計回りと少しずつ回して回転サーボモーターが停止したところでドライバーを外して調整終了です。
- プログラムで対応する方法
-
まっすぐ進まない場合
回転サーボモーターの特性上、それぞれ個体で回転速度は多少異なります。まっすぐ進まない場合は、回転速度(プログラムで指定する角度)を左右で調節しましょう。
例えば、左側の(P0に接続している)回転サーボモーターの回転速度が右側より速い場合、左側の回転速度を遅くするとよりまっすぐに進むかもしれません。※こちらの数字はあくまで参考です。実際に動かしながらまっすぐ進む角度を探しましょう。

-
下記パーツを1つだけ接続することができます。
接続できるパーツ
- ベーシックモジュール用サーボモーターセット
- ベーシックモジュール用回転サーボモーターセット
- ベーシックモジュール用フルカラーシリアルLEDテープ
コードの色が写真の並びになるように接続してください。
-
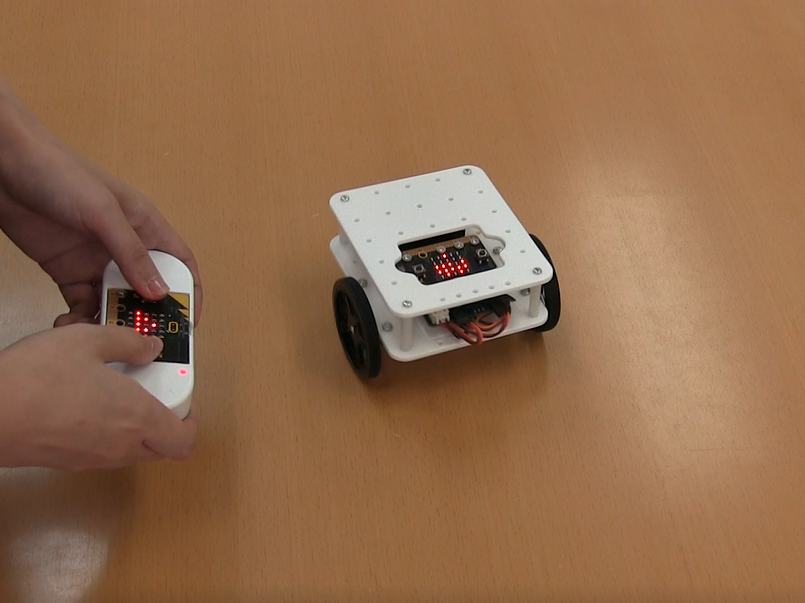
micro:bit用コントローラーキットと組み合わせて遊んでいる様子
本キットに、micro:bitは含まれません



作例:テーブル上を上手に走る車
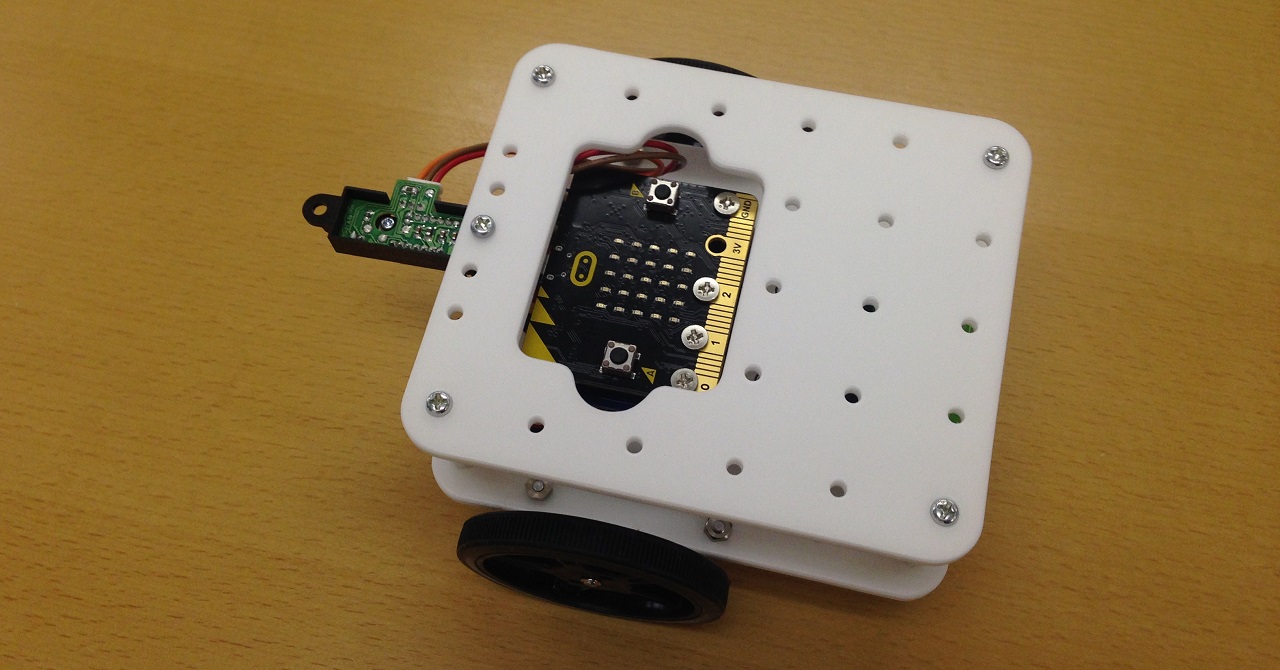
先端にベーシックモジュール用距離センサーを取り付け、テーブルとの距離を常にチェックしています。前進中テーブルの端に到達したら、後進して方向転換します。
作例:みんなでロボットサッカーをしよう!
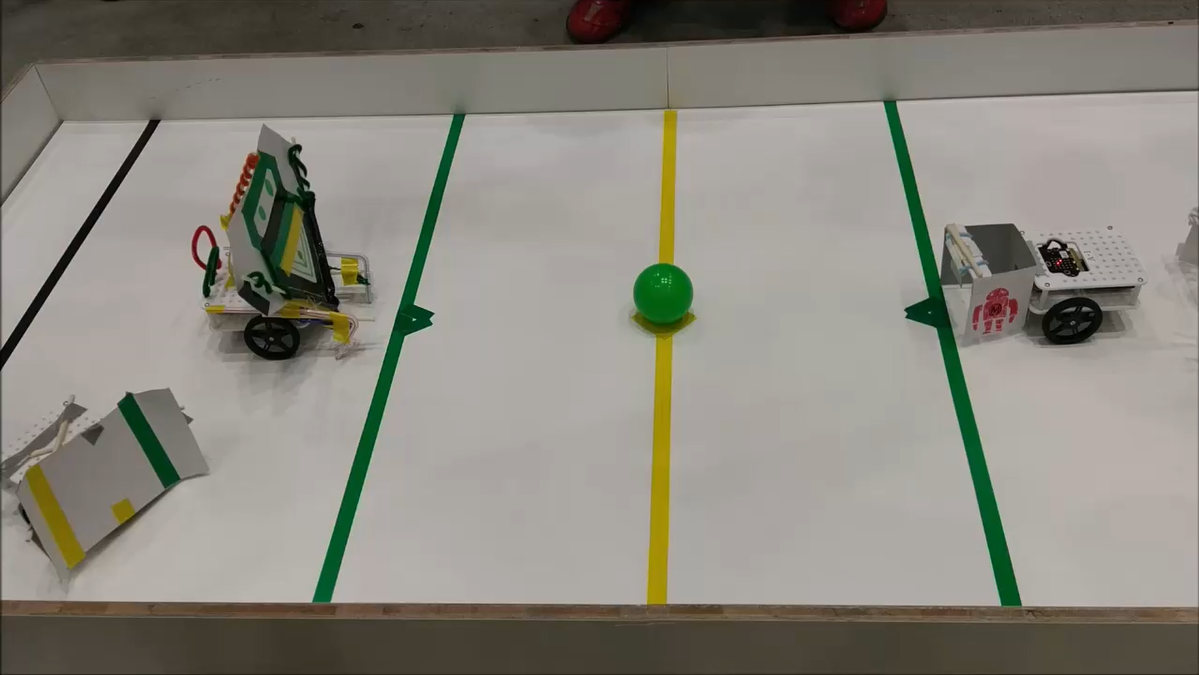
micro:bit用コントローラーキットをリモコンとして利用し、車体にオリジナルバンパーを取り付けると、micro:bitでロボットサッカーができます。
ロボットサッカーワークショップ@Maker Faire Tokyo 2018での試合の様子(YouTube)
※音量にご注意ください
バンパー例
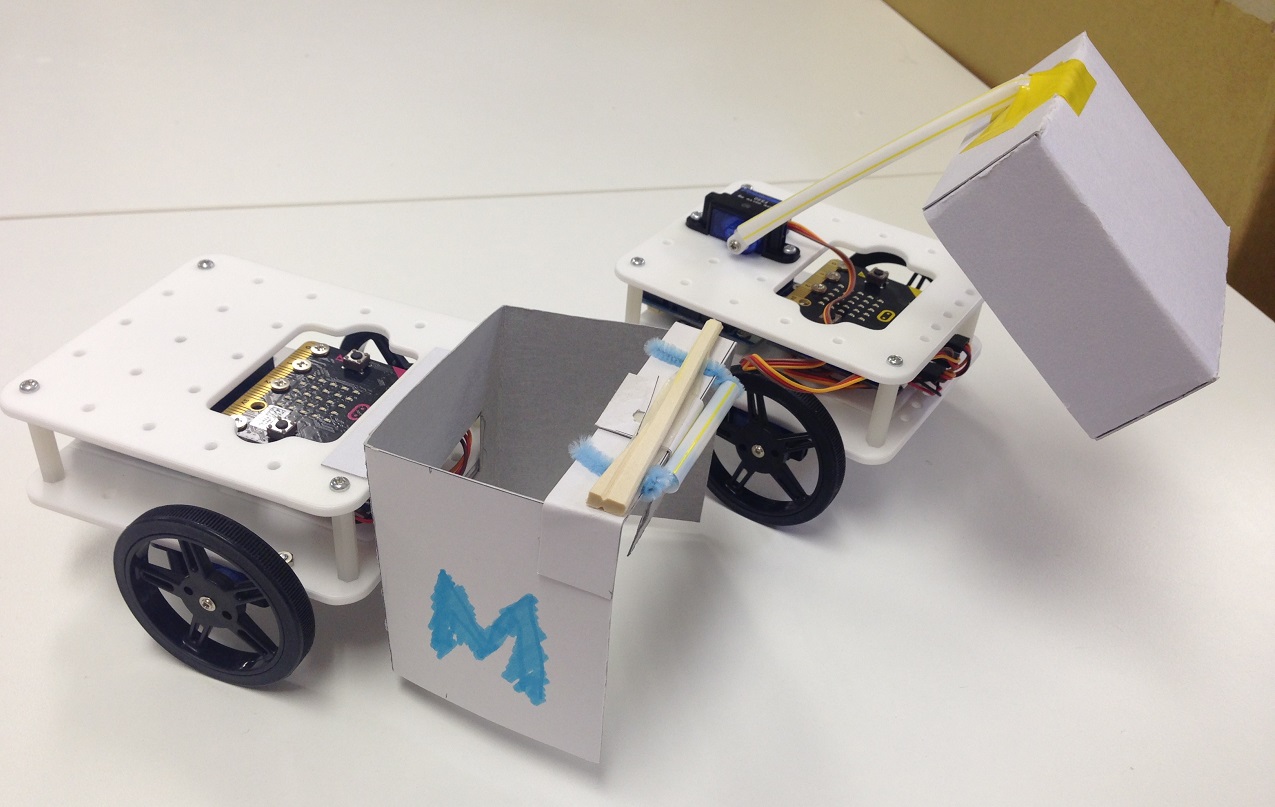
右奥の車はベーシックモジュール用サーボモーターセットを追加して、ボールをつかむ機構を取り付けています。
バンパーを動かしている様子(YouTube) ※音量にご注意ください
サンプルプログラム(車側)
サンプルプログラム(リモコン側)