

STM32F103RCT6搭載 ROSロボットコントロールボード V3.0
送料区分: 200
商品コード: CYTRON-HAT-ROS-STM32
発売日: 2025-11-06
在庫数: 6
短いURL: ssci.to/10710
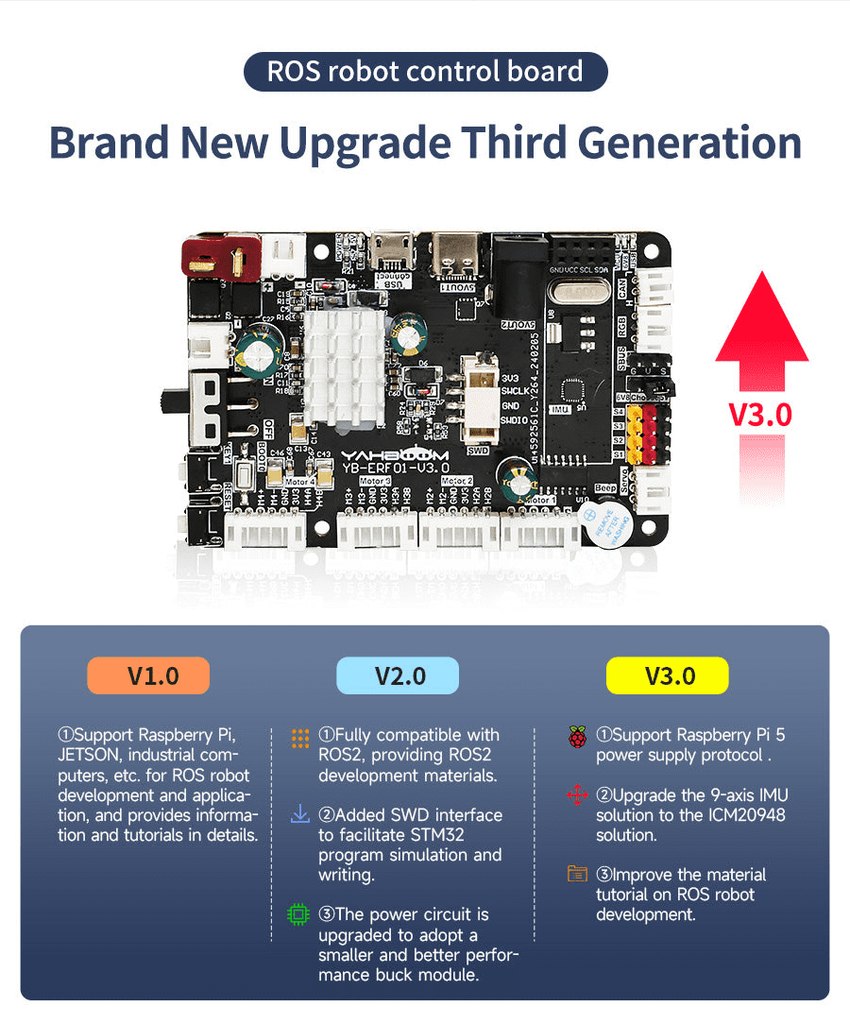
プロフェッショナルなロボット開発や学術研究のために設計された次世代拡張モジュールです。RDK X5、Raspberry Pi 5、Jetson シリーズボード、産業クラスのコンピュータとシームレスに動作し、 高性能の組み込み制御と柔軟性の高いROS(Robot Operating System)を連携させます。
特徴
- シームレスな互換性:Raspberry Pi 5 電源プロトコルに対応、Jetsonシリーズ、RDK X5、産業用PCに完全対応。
- 9軸IMU: MPU9250経由で姿勢推定と動作検知が可能。
- マルチモーダルモータ制御:多様なロボット構成用にエンコーダモーター4チャンネル、PWMサーボ4 チャンネル、シリアルバスサーボに対応。
- 多目的通信インターフェース:CANバス、USBシリアル、SBUSを提供し、ロボットシステム内での柔軟な接続性を実現。
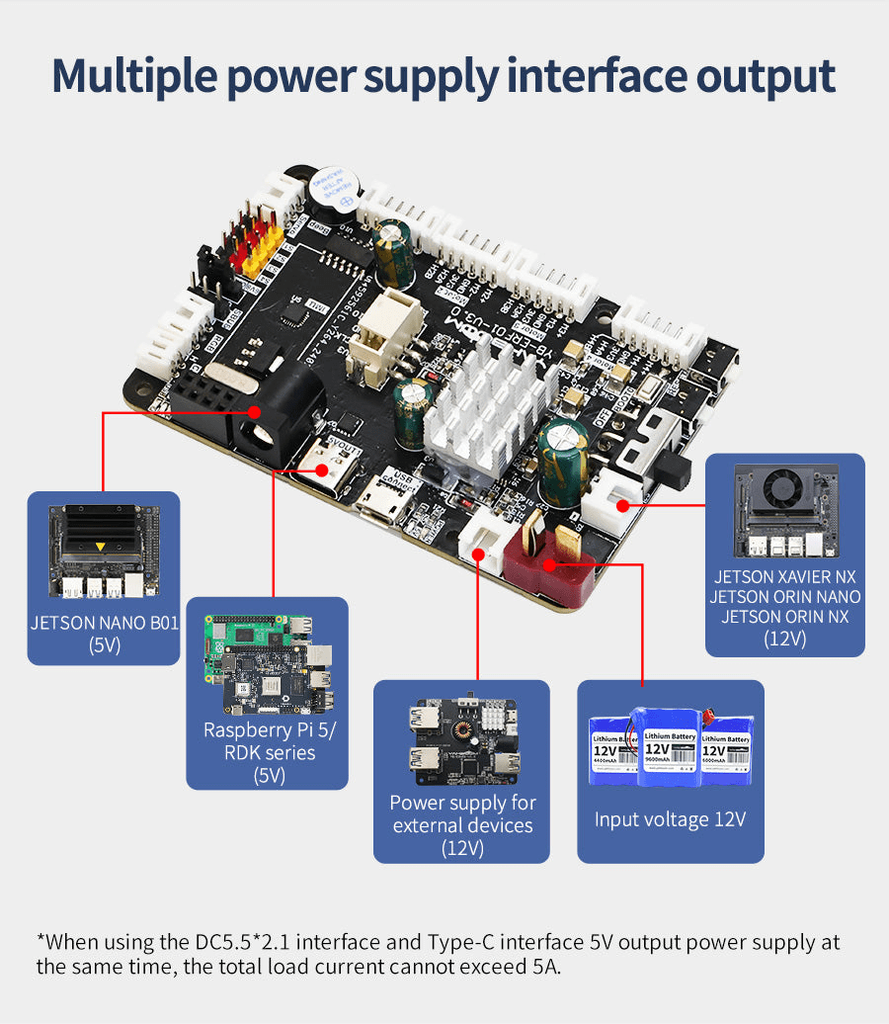
- 高信頼の電源管理:12 V入力、複数出力による安定かつ安全な電源供給チェーンが可能。
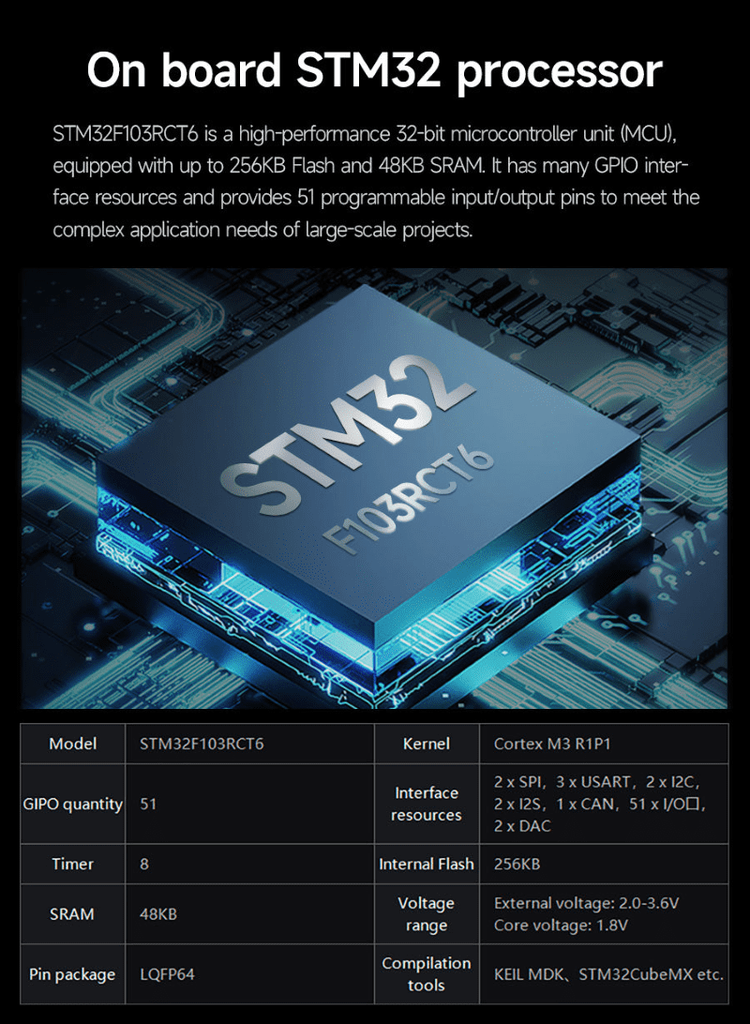
STM32プロセッサ
コアにはSTM32F103RCT6 32 bit ARM Cortex-M3マイクロコントローラが搭載され、複数のロボットサブシステムに渡って、高速処理、低遅延、信頼性の高い制御を実現します。
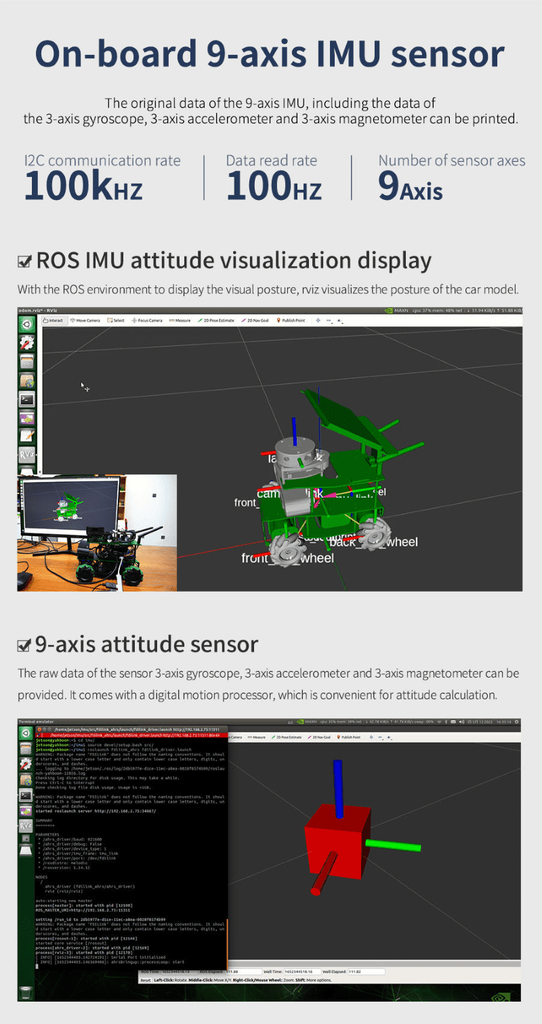
IMU
9軸IMU(ジャイロスコープ、加速度センサ、磁気センサ)MPU9250を内蔵、モーション検知と姿勢検出をリアルタイムで行い、スムーズなナビゲーション、安定した制御、精密なポジショニングを可能にします。
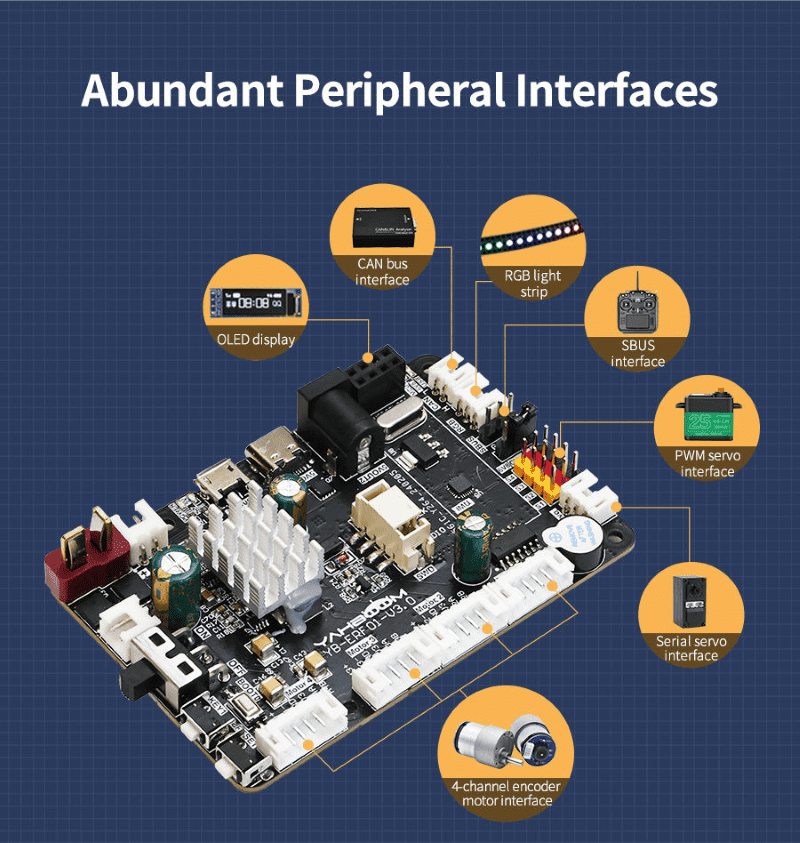
ペリフェラルインターフェース
4 x エンコーダDC モータ、4 x PWMサーボ、シリアルバスサーボに対応し、シンプルな差動駆動から高度な全方向ロボット、ヒューマノイドロボットまで構築できます。またRGB LEDストリングにも対応し、直感的な視覚フィードバック、状態インジケータ、インタラクティブ照明が実現できます。
CANバス、USB シリアル、SBUSなどのマルチインターフェース接続により、ホビーから産業用ロボットのエコシステムまで簡単に組み込めます。
電源
12 V電源入力と複数の定電圧出力ポートにより、安定した動作が保証され、ノイズを低減し、繊細な電子部品を保護します。
仕様
- MCU:STM32F103RCT6
- ボーレート:115200 bps
- データインターフェース:micro USB
- USB シリアル変換チップ:CH30
- データ出力方法:micro USB
- コマンド制御:シリアルコマンド対応
- IMU: ICM20948 9軸 IMU 姿勢センサ
- モータードライブ: AM2857 ドライバIC
- エンコーダモーター:4チャンネル 12 Vエンコーダモーター対応
- SBUS 制御:対応
- CAN 通信:対応
- 電圧出力: DC 12 V/DC 5 V/Type-C 5 V
- 待機電流:50 mA
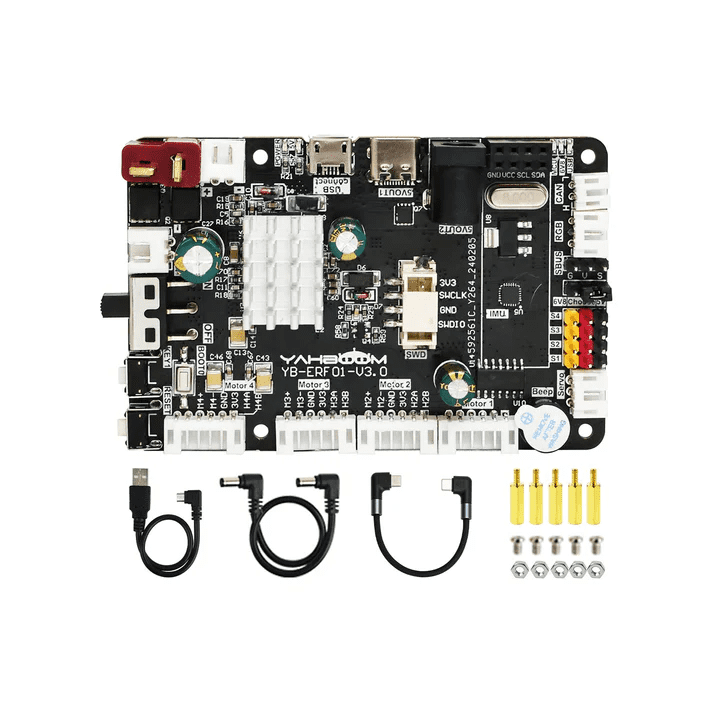
内容物
- 1 x STM32F103RCT6搭載 ROS ロボットコントロールボード V3.0
- 1 x micro USB データケーブル
- 1 x 両端 DC 電源ケーブル
- 1 x Type C - Type C 電源ケーブル
- 1 x ネジ一式
資料