

Pololu デジタル距離センサ パルス幅出力(300cm、サイドエントリー型コネクタ)
送料区分: 200
商品コード: POLOLU-5493
発売日: 2025-06-16
在庫数: 5
短いURL: ssci.to/10433
範囲300 cm内の物体の距離をデジタルパルス幅で測定できる小型距離センサです。短距離LiDARモジュールを使用し、赤外線レーザーパルスが物体に到着して反射するまでの時間を正確に計測します。センサが有効状態になると連続的に測距し、距離をハイパルスの幅でエンコードし、マイコンのデジタル入力で計測できます。
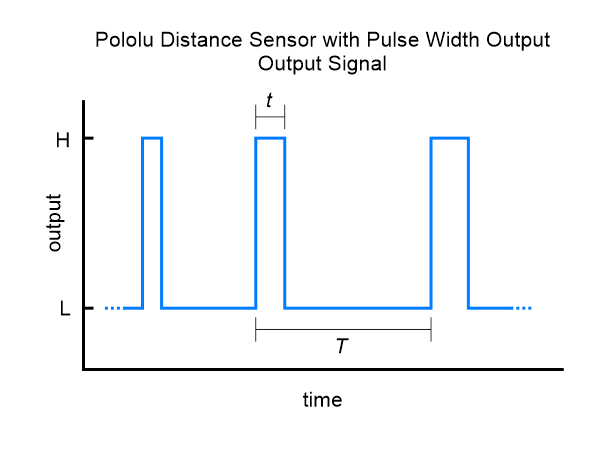
測定距離 d (単位 mm)とパルス幅t (単位 µs)の関係は以下の通りです。
タイミングの不確実性は約 ±5%です。物体がセンサに接近すると、出力パルス幅は1.0 msに近づき、300 cmで検出された物体のパルス幅は1.75 msになります。パルス幅2.0 msは物体が検出されていないことを示します。パルス周期 Tは30 msから33 ms程度で、検出された物体の距離に依存します。
最大検出範囲は物体の反射率と周囲光条件に依存します。テストによると、センサは約300 cm離れた壁、約170 cm離れた白い紙、約100 cm離れた手を確実に検出できました。
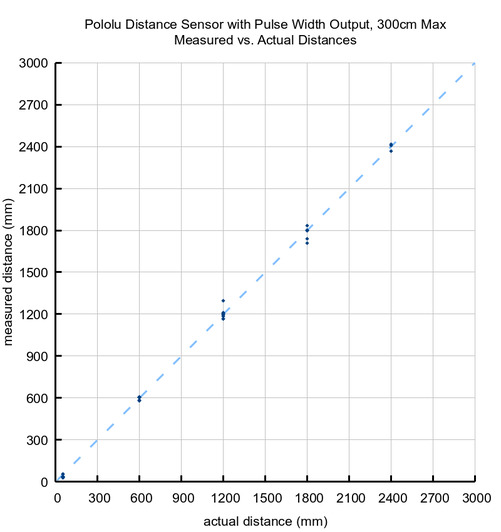
以下のグラフは、三つのユニット使用して、さまざまなターゲットでいくつかの異なる範囲で測定された距離と実際の距離を示したものです。
注意
センサは、センサ面から約1 mm以内の物体を検出できますが、距離測定できる有効な最小距離は約 4 cmです。4 cmより近い物体の距離測定は不正確になる可能性があります。
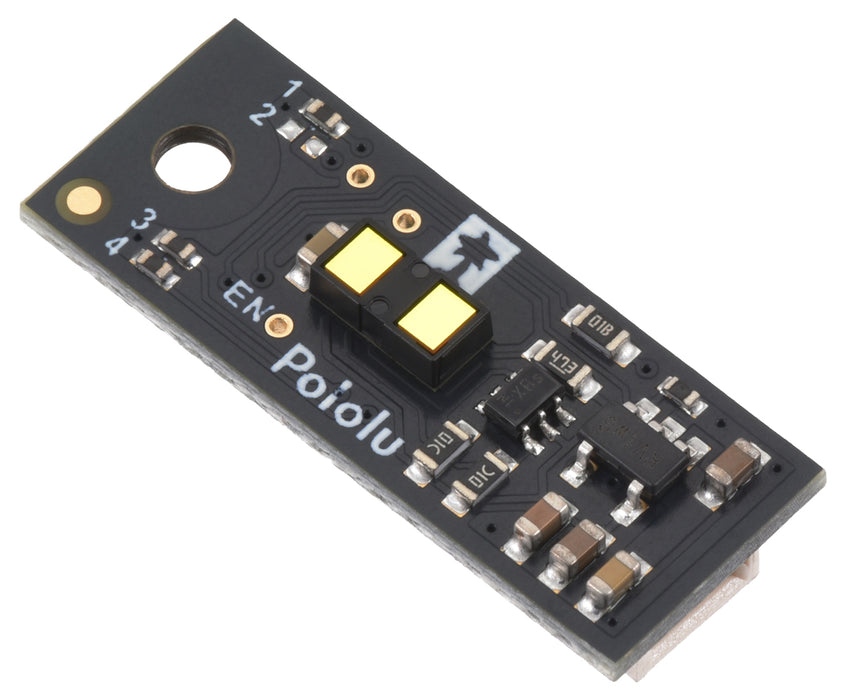
センサは側面に3ピンオスJST SHサイドエントリー型コネクタ付きです。2.54 mmピッチスルーホールにもコネクタと同一機能のものが引き出されています。
物体検出に反射光の強さを用いる単純な光学センサとは異なり、本センサは短距離LiDARモジュールを採用し、目に安全な赤外線レーザー光が、最も近い物体に到達し反射するのに要する時間を正確に測定します。このため、センサ性能は物体の反射率や周囲光条件(ただし極度に低反射率の物体では範囲が短くなります)にほとんど依存しません。
IRフィルタなしカメラで撮影した赤外線光
使用例
- ブレークビームセンサ、遮光センサの代替品
- ロボット用非接触バンパー/障害物検出器
- 機器/プロセスを起動する非接触インターフェース
- 通過物体のカウンタ/タイマー
仕様
- 動作電圧:3.0 ~ 5.5 V
- 消費電流:30 mA (有効時)、0.4 mA (無効時)
- 最大範囲: 300 cm (高反射率、良好な周辺光条件の場合)
- 最小範囲: 4 cm(正確な測距)< 1 mm’(検出)
- 解像度:2 mm
- 最小更新頻度:30 ~ 33Hz(周期 33 ~ 30 ms)
- 視野角(FOV):15° (標準値)、物体反射率及び周辺条件で変化
- エミッター:940 nm Class 1 VCSEL(vertical cavity surface-emitting laser)
- 出力:デジタルパルス幅
- コネクタ: 3ピンオスJST SHサイドエントリー型コネクタ
- 寸法:22.9 × 8.9 × 5.6 mm
- 重量:0.5 g
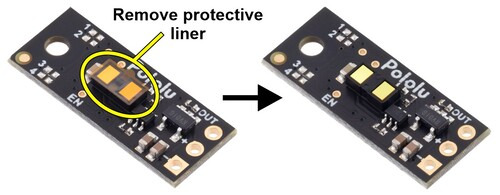
注意
保護フィルムを剥がしてください。

注意
- ENABLEピンをローにすると低消費電力モードに、VINにプルアップ(デフォルト)するとセンサは有効になります。
- ボードにはM2ネジ用の取付穴があります。
資料