


SKU 10853
【未発売】RDK S100 Developer Kit
送料区分: 650
商品コード: DROBOTICS-RDK-S100-DEV
在庫数: 0
短いURL: ssci.to/10853
本製品は2025年12月3日現在、未発売です。入荷情報をいち早く知りたい方は入荷通知登録が便利です。
本製品に同梱のACアダプターは日本の電気用品安全法に準拠したものをスイッチサイエンスで用意する予定です。
S100Eインテリジェントコンピューティングチップを搭載した、AIコンピューティングおよびロボティクスアプリケーション専用の開発ボードです。BPUは最大80 TOPSの計算能力を発揮します。
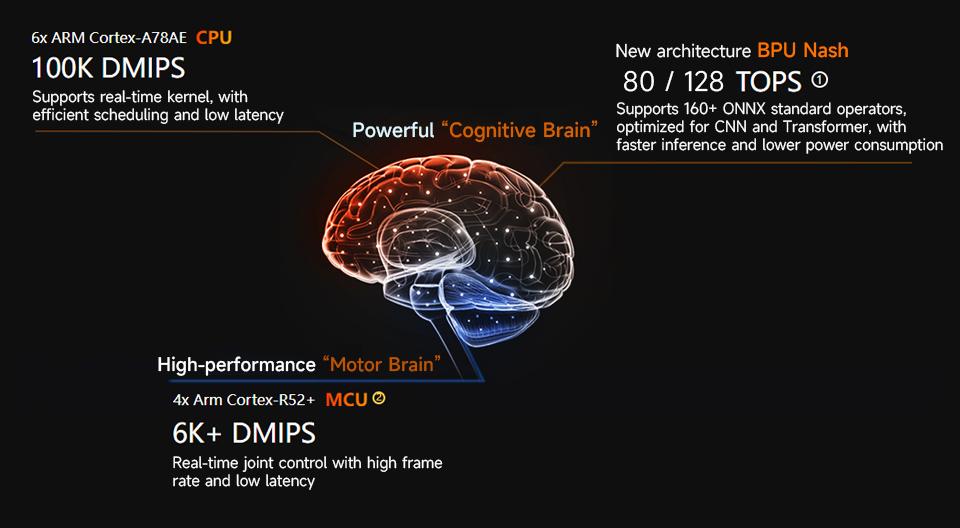
「知覚・推論の処理要求」と「リアルタイムモーション制御の要求」に同時対応できる独自のヘテロジニアスアーキテクチャを備えており、制御システムのサイズと複雑さを低減します。最先端のAIアプリケーションのデプロイを加速し、極めて複雑なリアルワールドタスクを処理するために設計されています。
RDK S100Pとの比較
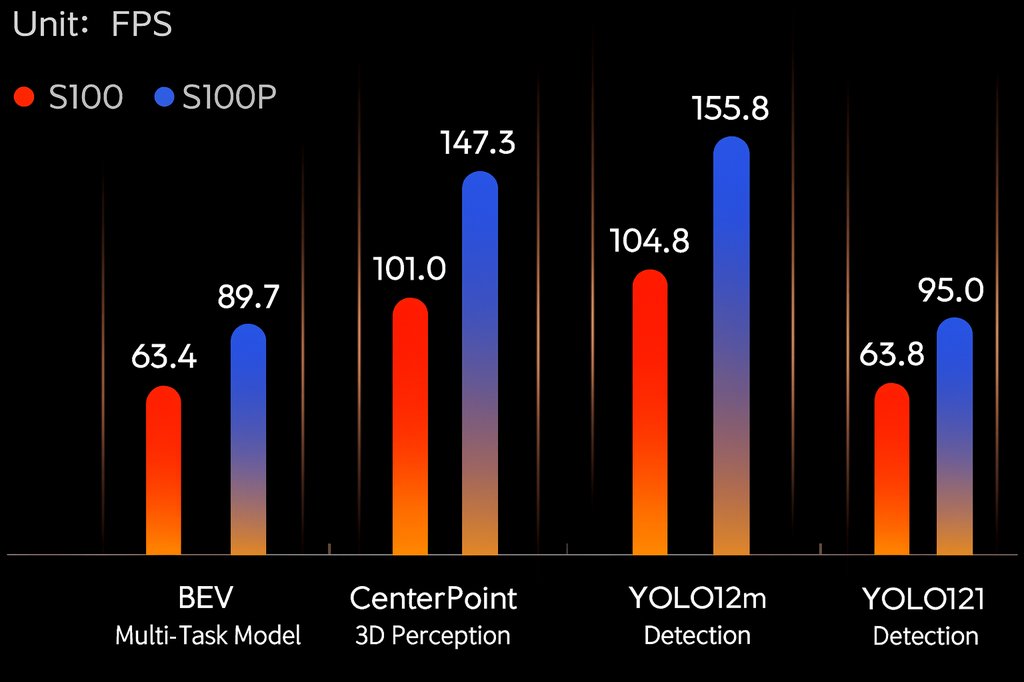
RDK S100Pは本モデル(S100)と比較して、CPU周波数が高く(2.0 GHz)、メモリ容量が大きく(24 GB)、BPU性能が向上(128 TOPS)したハイエンドモデルです。
特徴
- 強力な処理能力(80 TOPS):BPU Nashアーキテクチャを採用し、最大80 TOPSの演算能力を提供します。
-
ヘテロジニアスアーキテクチャ:
* パワフルな「認知ブレイン」:6x ARM Cortex-A78AE CPUを搭載。効率的なスケジューリングと低遅延でリアルタイムカーネルをサポートします。
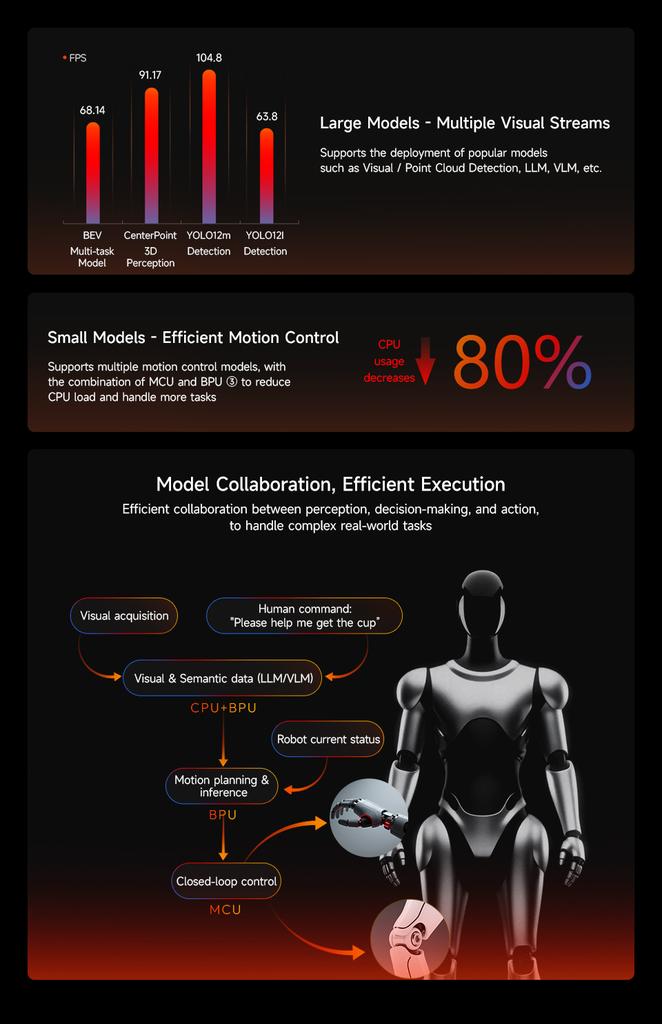
* 高性能な「運動ブレイン」:4x ARM Cortex-R52+ MCUを搭載。高フレームレートと低遅延でのリアルタイム関節制御を実現します。 - 効率的なモーション制御:MCUとBPUの組み合わせにより複数のモーション制御モデルをサポートし、CPU負荷を最大80%削減し、より多くのタスクを処理できます。
- 大規模モデルのサポート:Visual / Point Cloud Detection、LLM、VLMなどの一般的なモデルのデプロイをサポートします。
- エッジ・クラウド統合:データ収集、トレーニング、デプロイメントをカバーするワンストップの閉ループソリューションを提供します。
- ハードウェアアクセラレーション:公式のハードウェアアクセラレーション済みROS 2パッケージにより、より速く、より簡単に利用できます。
仕様(RDK S100)
| 項目 | 詳細 |
|---|---|
| SoC | S100E |
| BPU | 1 x BPU Nash (80 TOPS) |
| CPU | 6x ARM Cortex-A78AE (1.5 GHz) |
| MCU | 4x ARM Cortex-R52+ (1× DCLS, 1× Split-Lock) |
| GPU | ARM Mali-G78AE |
| メモリ (RAM) | 12 GB LPDDR5 (96-bit, 最大 6400 Mbps) |
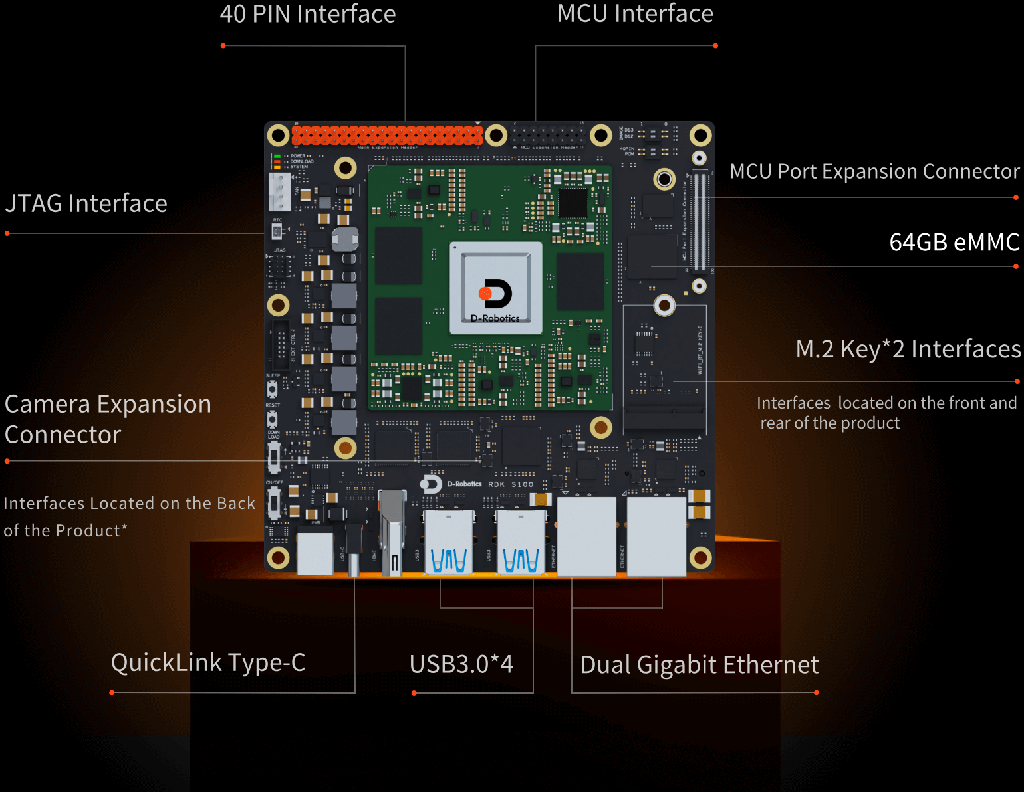
| ストレージ | オンボード 64GB eMMC、M.2 Key M SSDインターフェース |
| カメラ入力 | カメラ拡張インターフェース(3x 4-レーン MIPI CSI-2) |
| ディスプレイ出力 | 1 x HDMI Type-Aポート(最大 2560x1440@60Hz) |
| ネットワーク | 2 x RJ45ポート(ギガビットイーサネット)、M.2 Key E(Wi-Fi & BTモジュール用) |
| USBホスト | 4 x USB 3.0 Type-Aポート |
| デバッグ/デバイス | 1 x USB 2.0 Type-C(イメージ書き込み、MCU/メインドメインのシリアルデバッグ用)、1 x JTAGデバッグインターフェース |
| 汎用I/O | 1 x 40-Pin GPIO(SPI, I2C, I2S, PWM, UARTなど)、1 x MCU拡張インターフェース |
| 電源入力 | 12–20V DC (最大 150W)、90Wアダプターがパッケージに付属 |
| 動作温度 | 0℃ ~ 45℃ |
利用例
深層学習に基づく複雑なタスクの実行や、高度なロボティクス制御に最適です。

- マルチチャネルビデオ検出
- 半人型ロボット (Semi-humanoid robot)
- 四足歩行ロボット (Quadruped robot)
- 人型ロボット (Humanoid robot)
- 点足ロボット (Dot-foot robot)
- 小型二足歩行ロボット (Small bipedal robot)
- LeRobotアーム
- BEV検出
- LLM/VLMを使用した、知覚、意思決定、アクション間の効率的なコラボレーション
資料
販売元小売価格: 449 USD(税別)
販売元商品ページ: RDK S100 Developer Kit