


DRV8263H搭載DCモータードライバ
送料区分: 200
商品コード: POLOLU-5238
発売日: 2025-12-15
在庫数: 0
短いURL: ssci.to/10867
テキサス・インスツルメンツ社のDRV8263Hを使用したモータードライバ用ブレイクアウトボードです。動作電圧範囲は4.5 ~ 65 Vと広く、双方向ブラシ付きDCモータ1台に対して連続3.5 Aを供給できます。DRV8263Hは電流検出および電流制限機能を内蔵し、デフォルトでピーク電流10 Aに設定されています。また、低電圧・過電流・オーバーヒートに対する保護機能も備えています。さらに、基板側に逆電圧保護機能も追加されています。
特長
- 双方向ブラシ付きDCモーター1台、または単方向ブラシ付きDCモーター2台を駆動可能。
- モーター電源電圧範囲は4.5 ~ 65 V。
- 出力電流は約3.5 Aまで連続動作可能。(デフォルトの電流制限値は10 A、許容連続電流の上限は動作電圧、スルーレート、PWM周波数、周囲環境に依存する)
- ロジック電圧は3 ~ 5 V対応(最大5.5 V)。
- 電流検出機能と調整可能なアクティブ電流制限機能を内蔵。
- 入力制御モード:
- Phase / Enable(PH/EN)モード
- PWM(IN/IN)モード
- 独立ハーフブリッジ制御モード
- オフ状態診断機能により、負荷の断線や短絡状態を特定可能。
- 低電圧ロックアウト機能と、過電流および過熱に対する保護機能を搭載。
- 基板側に逆電圧保護を追加。
- 基板サイズは20.3 x 33 mm
- M2ネジ用取り付け穴二つ
ピン配置
| Pin | デフォルト状態 | 説明 |
|---|---|---|
| VIN | ― | 4.5〜65 Vのボード電源入力。 |
| GND | ― | モーター電源およびロジック電源用のグランド端子。 |
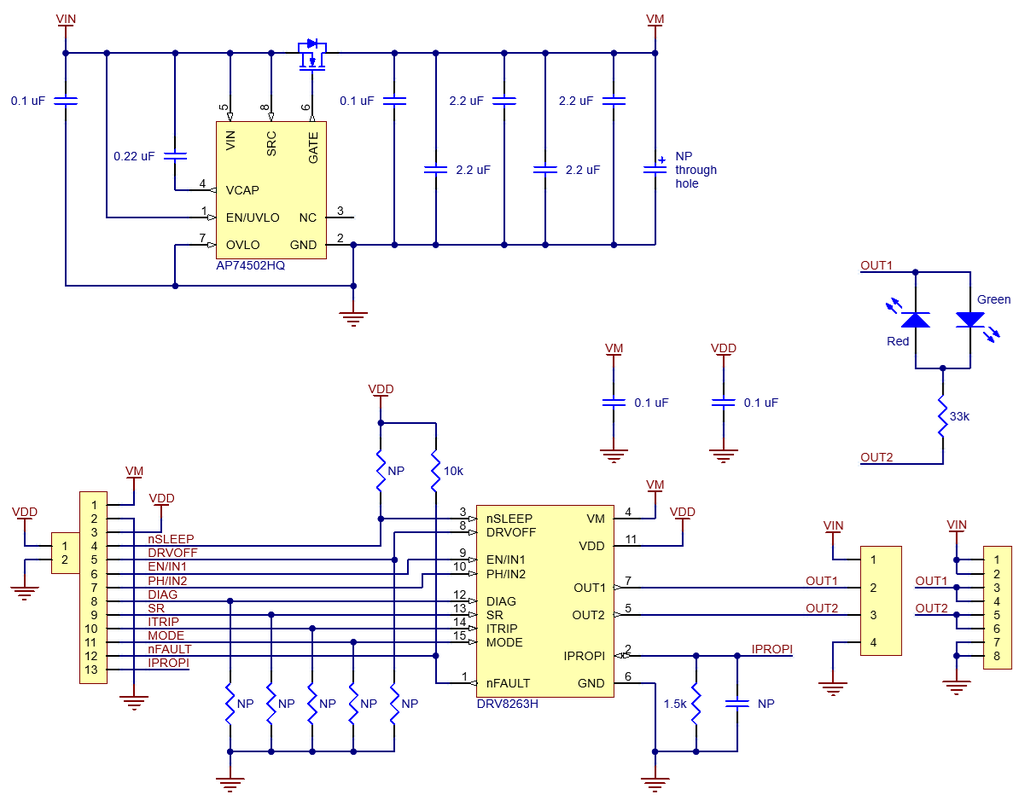
| VM | ― | 逆電圧保護回路通過後のモータ電源にアクセスするためのピン(下記の基板回路図を参照)。システム内の他のコンポーネントへ逆接保護された電源を供給するために使用できる。 |
| OUT1 | ― | モータ出力1 |
| OUT2 | ― | モータ出力2 |
| SLEEP | LOW | ローでドライバを低消費電力スリープモードにするスリープ入力。スリープ時にはドライバ出力はハイインピーダンス(コースト状態)になる。 |
| DRVOFF | HIGH | ハイにするとドライバ出力をハイインピーダンス(コースト状態)にする入力。 |
| EN/IN1 | LOW | モータ制御入力1、Phase/Enableモードではイネーブルピンとして機能する。 |
| PH/IN2 | LOW | モータ制御入力2、Phase/Enableモードでは回転方向を決めるピンとして機能する。 |
| DIAG | FLOATING | 負荷タイプの検出とフォールト時の動作を設定するための入力。このピンの状態は電源投入またはスリープ解除後のデバイス初期化時にラッチされる。 |
| SR | FLOATING | スルーレートを設定するための入力。このピンをGNDに接続することを推奨、その場合、最速のスルーレートが選択され、ドライバの出力電流能力が最大になる。このピンの状態は電源投入またはスリープ解除後のデバイス初期化時にラッチされる。 |
| ITRIP | FLOATING | ドライバのオプション機能である内部負荷電流制限(電流レギュレーション)を設定するための入力。デフォルト設定では電流レギュレーショントリップ閾値は3 Vで、デフォルトのIPROPI電流感度300 mV/Aで電流10 Aに相当する。このピンの状態はラッチされず、動作中の変更がそのまま反映される。 |
| MODE | FLOATING | 制御モードを設定する入力。フローティング(デフォルト)にするとPWM(IN/IN)制御モードが選択される。lowにするとPhase/Enable(PH/EN)モードが選択される。16 kΩの抵抗を介してGNDに接続すると独立ハーフブリッジ制御モードが選択される。このピンの状態は電源投入またはスリープ解除後のデバイス初期化時にラッチされる。 |
| FAULT | PULLED UP | フォールト出力。基板ではこのピンを10 kΩの抵抗でVDDにプルアップしており、デフォルトではhighに設定される。このピンはフォールト状態(例えば過電流、過温度、低電圧)の際にlawを出力する。また、ドライバのオフ状態診断機能の出力としても使用され、負荷の断線や短絡を識別できる。 |
| IPROPI | ― | 電流検出出力。このピンはモータ電流に比例したアナログの電流検出電圧を出力し、デフォルトではおおよそ300 mV/Aである。 |
接続
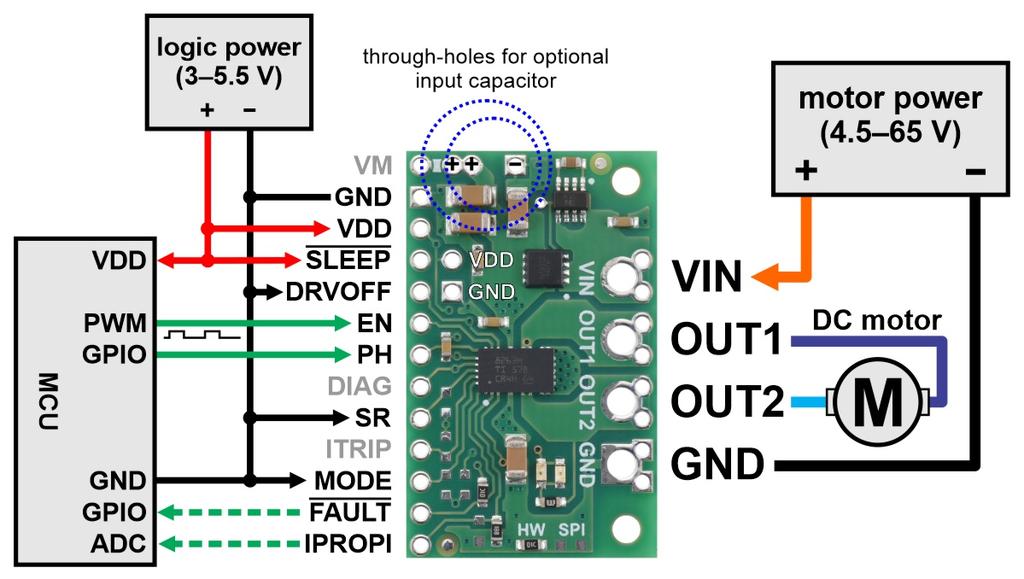
モータとモータ電源(4.5 ~ 65 V)の接続端子は基板の一方の側にあり、制御用接続(3 ~ 5 Vのロジック電源)は反対側に配置されています。大電力ライン(VIN、OUT1、OUT2、GND)の接続には二つの方法が用意されています。一つは5 mmピッチのターミナルブロックに対応した5 mm間隔の大きな穴、もう一つはピンヘッダが使用でき、ユニバーサル基板やブレッドボード、0.1インチコネクタに対応した0.1インチ間隔の穴のペアです。これらの穴は制御用端子と同じ0.1インチグリッド上に配置されています。また、よりコンパクトに実装したい場合は、配線をスルーホールに直接ハンダ付けすることも可能です。
ドライバはデフォルトでは無効状態で、有効にするにはSLEEPをhigh、DRVOFFをlowに設定する必要があります。この設定は、制御デバイスの汎用デジタル出力を使用してダイナミックに切り替えることもできますし、隣接するVDDやGNDのスルーホールへジャンパ接続するなど、ドライバが有効になるようにロジック電圧へピンを固定することでも行えます。
DRV8263は、Phase / Enale(PH/EN)、PWM(IN/IN)、独立ハーフブリッジという3種類の制御モードを備えています。制御インターフェースはMODEピンによって決定され、その状態は電源投入時、またはSLEEPピンによってドライバが有効化されたタイミングでラッチされます。
性能を向上させるため、モータードライバの近くでモーター電源とGNDの間に大容量コンデンサを接続することを推奨します。一般的には、容量が少なくとも数百µFあり、耐圧が最大電源電圧を十分に上回るコンデンサの使用を推奨します。電源が不安定な場合やドライバから距離がある(約30 cm以上)場合は、より大きな容量が必要となりますし、モーターの特性や使用するPWM周波数といった他の要因によっても必要な容量は変化します。スルーホール型のコンデンサであれば、シルク印刷でVMおよびGND(下の配線図では「+」および「−」)と記された穴を使って、基板へ直接実装することができます。本ドライバには8.8 µFのセラミックコンデンサが搭載され、短時間のテストや低出力での限定的な動作であればこれだけで十分な場合もありますが、ほとんどの用途においては、より大きなコンデンサを追加することを推奨します。
PWM (IN/IN) モード

MODEピンを未接続のままにすると、ドライバはPWM(IN/IN)制御モードに設定されます。この制御モードを使用する場合、一般的には二つのINピンそれぞれに対して、合計2系統のPWM信号を入力する必要があります。以下の真理値表は、IN/IN制御インターフェースを用いて、ドライブ / コースト(高速減衰)動作およびドライブ / ブレーキ(低速減衰)動作を実現する方法を示しています。
MODE=FLOATING時動作(PWM制御モード)
| IN1 | IN2 | OUT1 | OUT2 | 動作モード |
|---|---|---|---|---|
| 0 | 0 | H | H | ブレーキhigh(出力はVMに短絡) |
| PWM | 0 | H | PWM (L/H) | PWMデューティに応じた前進/ブレーキ動作(速度PWM %) |
| 0 | PWM | PWM (L/H) | H | PWMデューティに応じた逆転/ブレーキ動作(速度PWM %) |
| PWM | 1 | inverted / PWM (L/Z) | inverted / PWM (H/Z) | 速度(100% − PWM %)に応じた逆転/コースト動作 |
| 1 | PWM | inverted / PWM (H/Z) | inverted / PWM (L/Z) | 速度(100% − PWM %)に応じた前進/コースト動作 |
| 1 | 1 | Z | Z | コースト(出力オフ) |
一方のINピンをLowに保持した状態でもう一方のINピンにPWM信号を入力すると、反対側のOUTピンの出力が変化することに注意してください(例えば、IN2がlowのときにIN1でPWMを行うと、OUT2がlowとhighの間で変化します)。二つのINピンの状態が異なるときはOUTピンがそれぞれの入力と同じ状態になり、両方のINピンがlowのときは両方のOUTピンがhighになってブレーキがかかる、と覚えるとより直感的かもしれません。
Phase / Enable(PH/EN)モード
上の図にあるように、ドライバを有効(Enable)にする前にMODEピンをグラウンド(接地)に接続すると、ドライバは「Phase / Enable制御モード」に設定されます。
このモードでは、PHピンがモーターの回転方向を決定し、ENピンにPWM信号を入力することでモーターの速度を制御できます(これは一般的に「サイン・マグニチュード(符号・絶対値)動作」と呼ばれます)。
このモードはPWM信号が一つだけで済むので一般的に扱いやすいですが、ドライブ / ブレーキ動作しか行えません。
(注:ドライブ / ブレーキ動作は、ドライブ / コースト(空走)動作に比べて、PWMのデューティ比とモーター速度の関係がより直線的(リニア)になる傾向があるので、可能な限りドライブ / ブレーキ動作の使用を推奨します。)
MODE=GND時の動作(簡易版)
| EN | PH | OUT1 | OUT2 | 動作モード |
|---|---|---|---|---|
| 0 | X | H | H | ブレーキhigh(出力はVMに短絡) |
| PWM | 1 | H | PWM (L/H) | PWMデューティに応じた前進/ブレーキ動作(速度PWM %) |
| PWM | 0 | PWM (L/H) | H | PWMデューティに応じた逆転/ブレーキ動作(速度PWM %) |
このモードは、ロックアンチフェーズ制御にも使用できます。この場合、Phase(PH)ピンに十分に高い周波数(最大100 kHz)のPWM信号を入力し、Enable(EN)ピンはhighに固定します。
ロックアンチフェーズ制御では、PWMのデューティ比によって速度と回転方向の両方を制御します。デューティ比0%で一方向への全速回転となり、100%で反対方向への全速回転となります。デューティ比が50%のとき、モーターは停止します。適切なPWM周波数は、一般的にモーターのインダクタンスに依存します。
独立ハーフブリッジモードの高度な使用
ドライバを有効にする前に、16 kΩの抵抗を介してMODEピンをグラウンドに接続すると、独立ハーフブリッジ制御モードに設定されます。この制御モードの詳細については、DRV8263のデータシートを参照してください。
電流検出と制限
ドライバのIPROPIピンは、(Hブリッジのhigh側MOSFETを通して測定された)モーター電流に比例した電圧を出力します。出力電圧はデフォルトで約300 mV/A です。
DRV8263H-Q1は、電流チョッピングによってモーター電流を制限する機能を備えています。IPROPIの電圧が設定された閾値に達すると、ドライバは約30 µsの間ブレーキモード(緩やかな減衰)に入り、その後再びモーター駆動用の電力を供給します。これにより、走行中の消費電流は数アンペアでも、始動時にはその数倍の電流を必要とするようなモーターを、より実用的に使用できるようになります。
電流制限値は、ITRIPの設定と電流検出感度の両方の影響を受けます。デフォルトでは、電流制御のトリップ(遮断)閾値は3 Vです。これはデフォルトの感度300 mV/Aと合わせると、10 Aの電流制限に相当します(3V ÷ 0.3V/A = 10A)。
データシートに記載されているように、ITRIPを抵抗経由でグランドに接続することで、この閾値を下げることができます。また、ITRIPを直接接地することで、電流制限を完全に無効化することも可能です(ただし、ドライバが持つ独立した過電流保護機能は有効なまま残ります)。あるいは、基板上にすでに実装されている1.5 kΩの抵抗と並列になるように、IPROPIに外部プルダウン抵抗を追加して電流検出感度を下げることで、電流制限値を上げることも可能です。
実使用における電力損失(放熱)の考慮事項
DRV8263Hには最低28 Aで作動する過電流保護機能を備え、本基板はデフォルトで10 Aに電流制限が設定されています。しかし、チップ単体ではそれより低い電流でもオーバーヒートする可能性があります。
Pololu社が実施した試験によると、基板上のチップに10 Aを流した場合、1秒も経たないうちに熱保護機能が作動し、モーター出力が無効化されました。 実際に供給可能な電流は、モータードライバをどれだけ効率的に冷却できるかに依存します。シールドのプリント基板は、モータードライバチップから熱を放散するように設計されています。
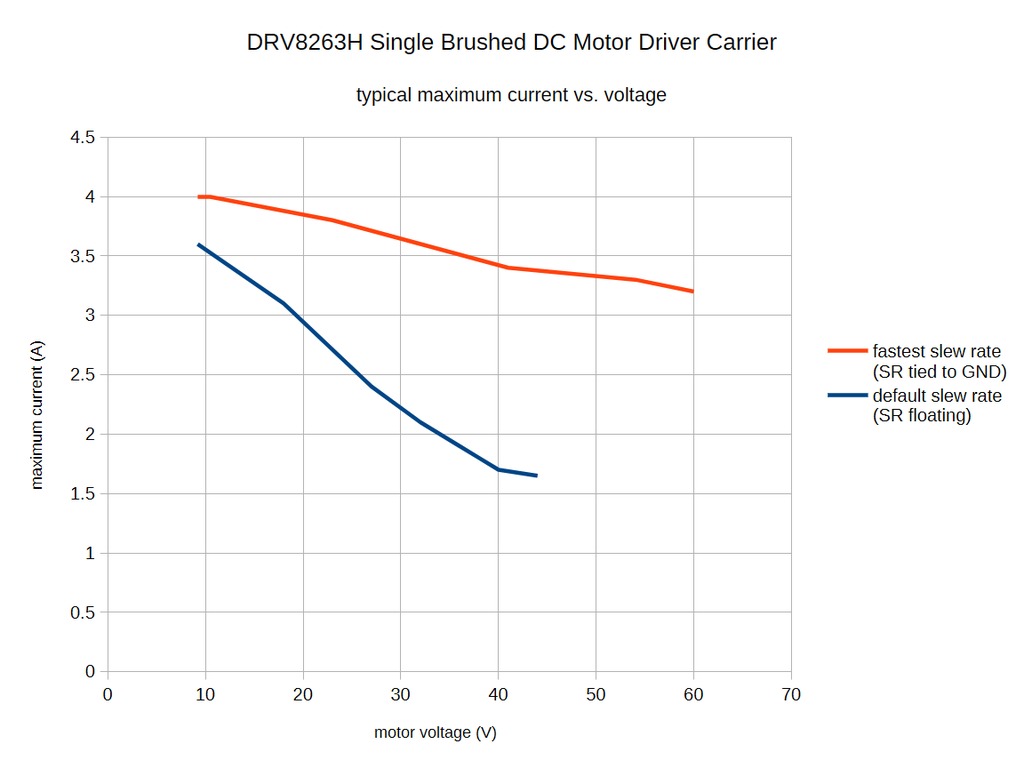
また、モーターをPWM制御すると、その周波数に比例して発熱が増加します。ドライバのスルーレート設定も発熱の要因となります。ほとんどの用途において、DRV8263Hの最速のスルーレートを選択するように、(上記の配線図に示すように)SRピンを直接接地することを推奨します。
このグラフは、スルーレートとモーター電圧が、ドライバが持続可能な連続最大電流にどのような影響を与えるかを示しています。
回路図
寸法
- サイズ:約20.3 x 33 mm
- 重量:2.5 g(本体のみの重さ)
資料