
KXR-L4T-R カメ型・ローバー型 Ver.2(アカデミックパック)
送料区分: 650
商品コード: KONDOKAGAKU-3156
発売日: 2020-01-15
在庫数: 0
短いURL: ssci.to/6018
KXR-L4T-R カメ型・ローバー型ロボットキットの新バージョンで、サーボにKRS-3302 ICSを使用しています。バランスを崩しにくく安定した歩行が可能で、4輪のローバー型に組み替えることもできます。
仕様
- 完成時サイズ :
- カメ型:275(H)× 119(W)× 153(D)mm
- ローバー型:272(H)× 146(W)× 162(D)mm
- 重量(バッテリー含む)
- カメ型:約630 g
- ローバー型:約690 g
※ サイズ、重量はArduino、シールドを搭載していない状態です。
ソフトウェア動作環境
- 対応OS : Windows Vista(SP1推奨) Windows 7、8、8.1、10
- CD-ROMドライブ(ソフトウェアインストール用)
- USBポート(1.1/2.0)
※ 使用する.NETのシステム要件を満たすこと。
内容物
- 強化樹脂パーツ
- コントロールボード : RCB-4mini
- サーボモータ:KRS-3302 ICS × 9
- バッテリー:ROBOパワーセル Eタイプ 6N-800mAh Ni-MH
- 充電器:BX-32MH
- Dual USB アダプタHS
- その他パーツ
- アカデミックパックの特別オプション
- KXRプログラミング学習用シールドセット(Arduino用)
- PSD(位置検出素子)センサ
※ マニュアル、サンプルプログラムなどのCD-ROMは付属しません。下記のボタンからダウンロードしてご利用ください。
資料
【プログラミング学習に最適なArduino向けシールドが付属】

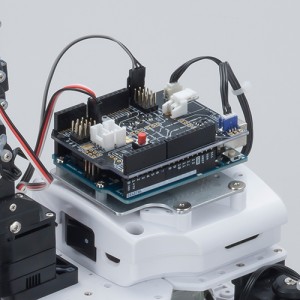
Ver.2のアカデミックパックには、KXRプログラミング学習用シールドセット(Arduino用)が付属します。このシールドを使用することでArduino Uno R3から弊社製シリアルサーボやロボットのコントロールボード(RCB-4mini)に直接命令を送ることができます。また、距離を計測できるPSDセンサも付属します。
公開しているサンプルプログラムを使用すれば、PSDセンサと組み合わせて簡単な自律ロボットを作成できます。サンプルプログラムでは、頭部を旋回しながら周囲の距離を計測し、データをソートして最も近距離の物体に近づくプログラムを実行します。これは、基本的なプログラム知識を学ぶために最適な内容になっていますので、プログラミング学習を始めた方に最適です。
シリアルサーボやコントロールボードと通信するためのライブラリも公開していますので、数行のプログラムで簡単に制御することができます。
下記のリンクよりサンプルプログラムとマニュアルをダウンロードできます。
『KXR-L4T-R アカデミックパックダウンロードセット Ver.1.0』
※ Arduino Uno R3は別売りです。
- 別途準備が必要な製品
- Arduino Uno R3
- USBケーブル(A-B)
【参考】RaspberryPiと組み合わせて画像処理

RCB-4に接続されているシングルボードを含むコンピュータで、Pyhtonが動作する環境であればこのライブラリを使用することができます。RCB-4には、ボード上のUARTもしくはDual USBアダプタHS経由で接続します。
このライブラリを利用してRaspberry Piを搭載したデモ機を作成しました。Arduinoと同じように、処理はRaspberry Pi、ロボット(サーボ)の制御はRCB-4と分担することでボードへの負荷を軽減することができます。下記の記事を参考にぜひお試しください。
※ このキットには、Raspberry Piなど記事内のデモを再現するための製品は付属しておりません。
【KXRオプションパーツを追加可能】
KXRシリーズ最大の魅力である「組換自由」を実現するために多数のオプションパーツをご用意しました。KXRのキットをベースに、パーツを組合せるだけで簡単に自分に合ったロボットに組み換えることが可能です。
例えば、脚の構造を変えたり、手先にグリッパーハンドを装着したり、頭部の可動軸を増やしたり。アイデア次第でロボットがどんどん進化していきます。
※ スイッチサイエンスでは現在一部オプションパーツの在庫販売はしておりませんが、お取り寄せを承ることは可能です。お問い合わせフォームよりご連絡ください。
【ジョイントベースはナット交換式】


組み立ての基礎となるジョイントベースパーツは、複数回の組み換えに対応するためにナットが装着できるようになっています。ビスのねじ込みはナットへ行いますので、ねじ止めを繰り返すことでなめがちなねじ穴を、簡単に復活させることが可能です。
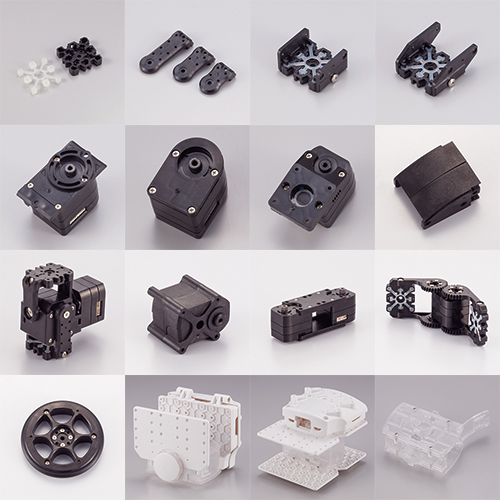
【特殊素材のパーツ群】
アームやジョイントパーツ類は、ガラス繊維入りの強化樹脂を採用し、耐久性が高くロボットの激しい動作に十分耐える強度を確保しています。
【安定した四足歩行】

KRSシリーズのノウハウを継承したKRS-3302を使用することで、ロボットがしっかりとした動作を行うことが可能です。さらに、四足歩行のカメ型ロボットは、バランスを崩しにくく安定した歩行が可能です。初めてロボットを組み立てる方でも手軽に組み立てられますので、エントリーモデルとしてもおすすめです。
★ Ver.2のポイント:KRS-3301が3302にリニューアル!

KRS-3302は、KRS-3301に比べてパワフルなモータを採用しています。特に変わった点は保持力です。3302は、保持力が高まったことにより、より安定したモーション再生ができるようになりました。また、ハンチング(サーボの軸が振動する現象)が起こりにくくなりなりました。
KRS-3302の詳細はこちらをご覧ください。
【四輪ローバー型に組換可能】

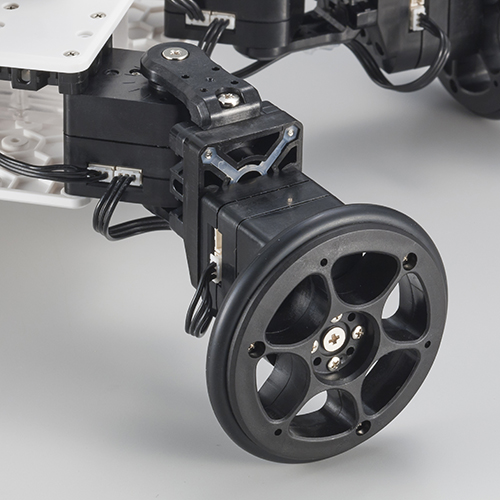
パーツを組み換えることで足先を車輪に換装することができます。必要なパーツはすべてセットに含まれていますので追加でご用意する必要はありません。一つのセットでカメ型・ローバー型両タイプをご利用いただけます。
車輪の回転には、回転モードに設定した関節と同じKRS-3302 ICSを使用しますので、通常モードのサーボと同じように回転速度と方向を指定できます。
【さらに組みやすくなったパーツ構成】

パーツの組合せによる拡張性を確保しつつ、組み立てやすさがアップしました。詳細な組立説明書が付属しますので、手順通りに組み立を行えば本格的なロボットをくみ上げることができます。
特殊な工具は必要ありません。プラスドライバー(0、1番)およびニッパーなど、ホームセンターで購入できる工具で組み立てが可能です。
【クリアパーツのバッテリーボックス】
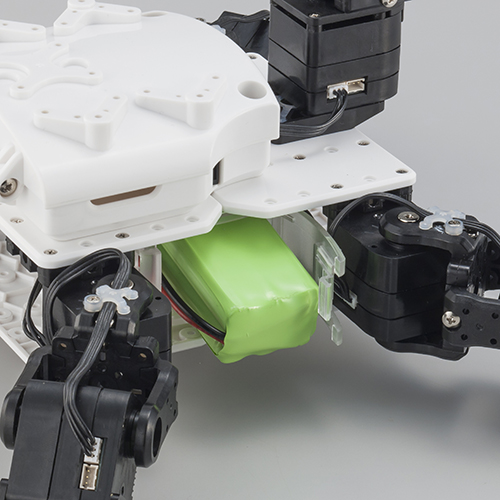
バッテリーボックスにクリアパーツを採用することで、バッテリーの搭載有無をすぐに確認することができます。また、開閉式のハッチを採用しましたので、ワンタッチで簡単にバッテリー交換が可能です。
【拡張性のあるバックパック】
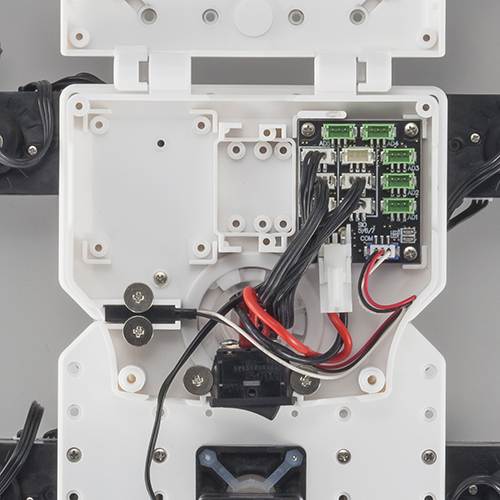
バックパックには、ロボットの頭脳となるコントロールボードのほかに、ジャイロセンサや加速度センサ、無線コントローラの受信機を搭載することが可能です。ロボットの電源スイッチもここに装着されていますのでON/OFFの切り替えも簡単に行えます。
※ センサ、無線コントローラは別売りです。
【ダミーサーボを交換して軸を追加】

頭部のダミーサーボを交換しパーツを追加すれば、うなずきも可能になります。
【専用モーション作成ソフトが付属】
セットにはモーション作成ソフトHeartToHeart4が付属します。このソフトを使用することで、プログラム言語を使用することなく、マウス操作で簡単にモーションを作ることができます。さらに、「教示機能」を使用すれば、ロボットに取らせたポーズをソフトに読み込むことができますので、さらに簡単にモーション作成が可能です。
その他、ロボットのメンテナンスやバッテリーの電圧チェックも可能です。
【多数のサンプルモーションが付属】
歩行モーションや、挨拶モーションなどの基本動作がサンプルとして付属していますので、ロボットを組み立ててすぐに動かすことができます。
【キット内容とオプションの搭載】
■ キット内容でできること
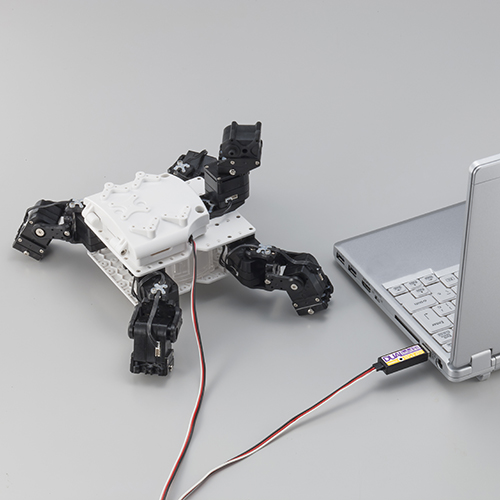
本製品のセット内容は、ロボット本体のみのシンプルな構成です。キットの状態では、付属のUSBアダプタを使用して有線でPCと通信します。PCにインストールされた専用ソフトHeartToHeart4を使用することで、ロボットのメンテナンスから、モーションの作成と登録、再生まですべて行うことができます。
このキットにオプションのセンサやユニットを追加することで、無線操縦や歩行の自動補正などを行うことができます。
■ 小型充電器が付属

本製品にはUSB接続タイプの小型充電器が付属します。スマートフォンの充電などで使用するUSB対応のACアダプタで利用可能です。1~2 A出力タイプのACアダプタにてご利用ください。
※ ACアダプタはセットには付属していませんので、USB ACアダプタ 5V/2.0Aなどを別途用意してください。
※ 本充電器はPCのUSBから充電することはできません。PCから充電した場合、PC本体が破損する可能性がありますので_絶対に接続しないよう_、ご注意をお願い致します。
■ おすすめオプション

手元のコントローラでボタン操作によるロボットの無線操縦が可能になります。セットには受信機が付属していますので、こちらのセットのみで無線化に対応します。
商品コード: KONDOKAGAKU-3156